Learn about motion control through our featured tutorials presented by industry leader Dr. Jacob Tal. Check out our library of tutorials for specific information on topics such as modes of motion, dual loop compensation, piezo-ceramic actuators, microstepping and much more. Our two minute videos are perfect for busy engineers that need quick solutions to common motion and I/O problems such as connecting to a Galil controller, PID temperature control with the RIO PLC, tuning suggestions, PVT mode of motion, and wiring optoisolated outputs. If you have an idea for a 2 minute video, contact a Galil application engineer at 800-377- 6329 or email support@galil.com.
Featured Tutorials
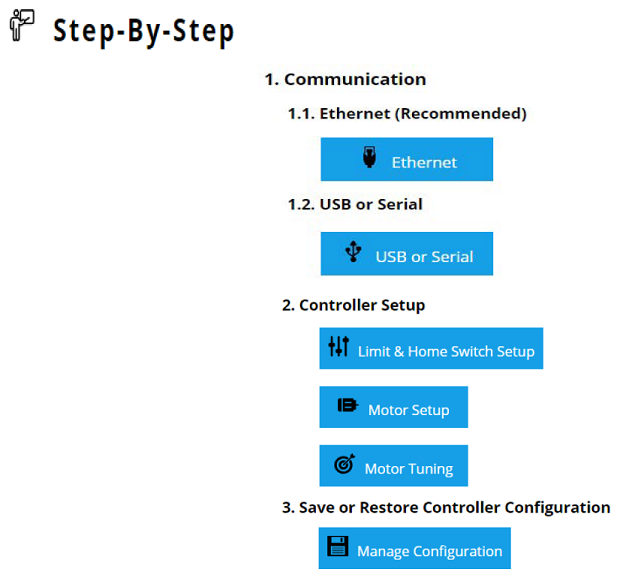
Introduction to Galil Design Kit Step-By-Step
Introduction to Galil Design Kit (GDK) Step-By-Step tool.
Introduction to Galil Design Kit
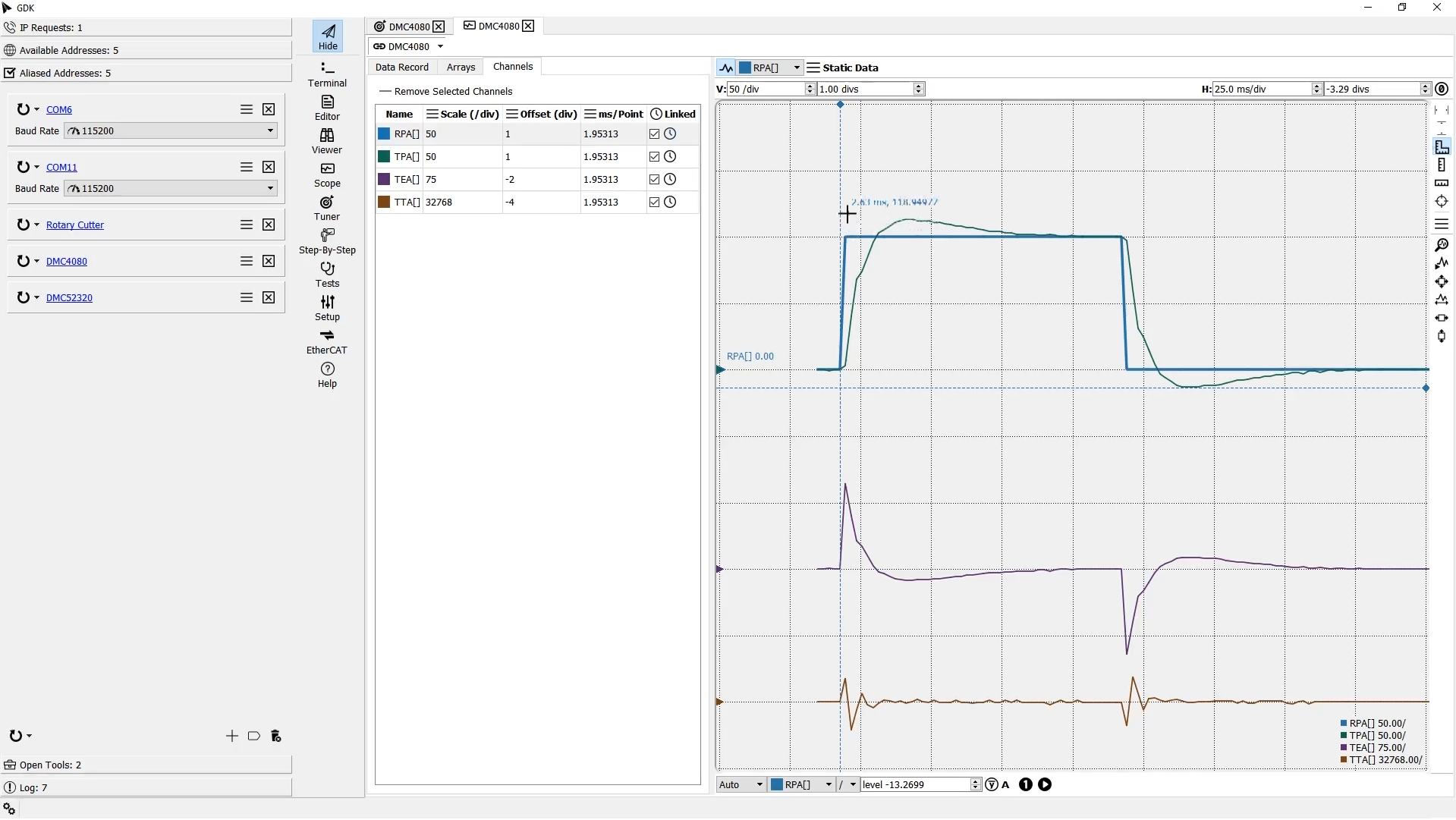
Galil Design Kit (GDK) features and tools at a general introductory level.
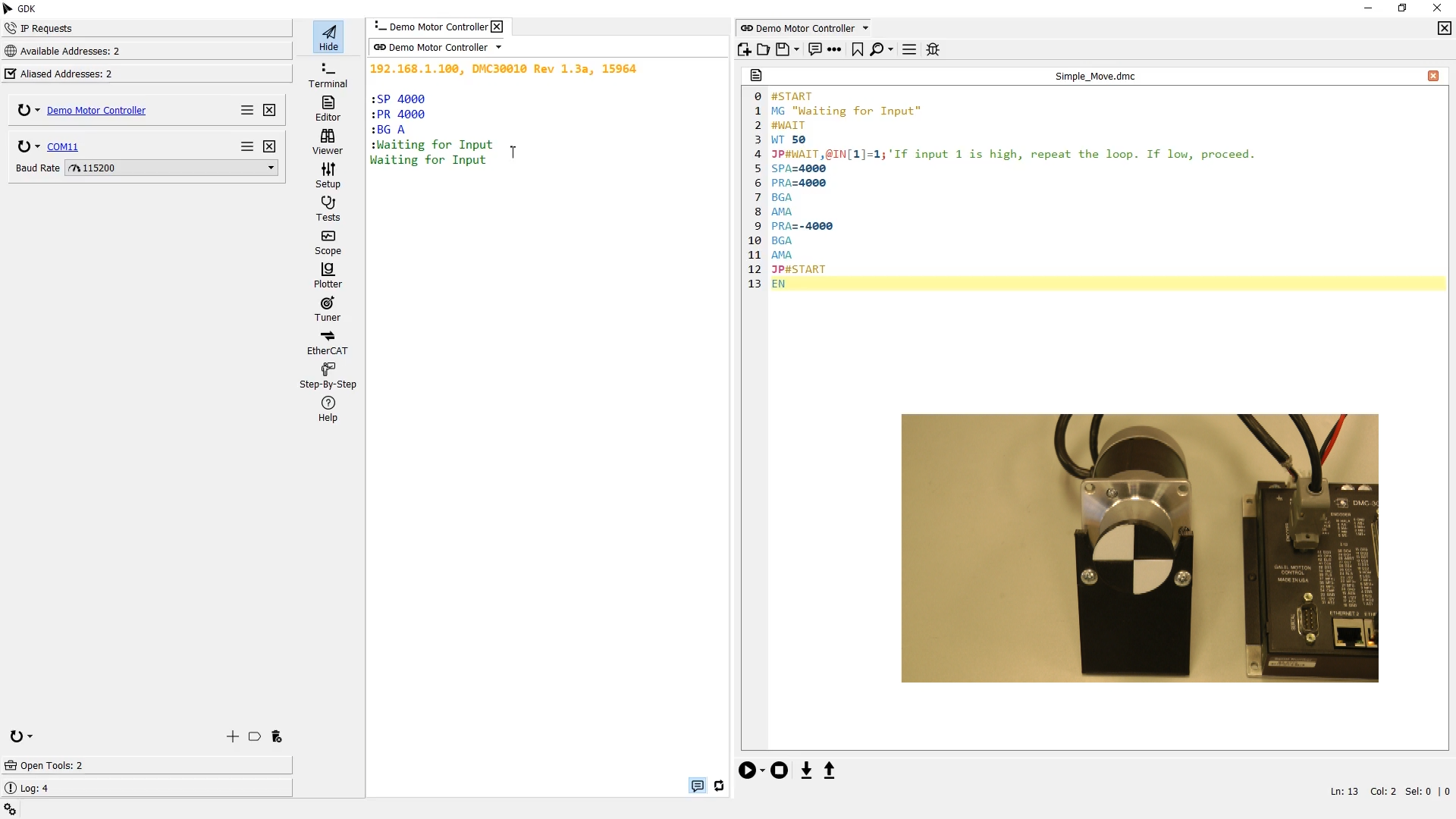
Basics of Galil Design Kit: Manager, Terminal & Editor
A walk through of the first steps of getting a Galil motion controller up and running using Galil Design Kit.
Two Minute Technical Videos
Completely Library of Tutorials
Tuning
- Adjustment of PID filter parameters for fast and stable performance of servo systems (Part 1)
- Adjustment of PID filter parameters for fast and stable performance of servo systems(Part 2)
- Discussion about notch filter, low-pass filter and feedforward control techniques
- Various methods of eliminating backlash are discussed including dual loop
System Design
- Various modes are discussed including jogging, point-to-point positioning, linear and circular interpolation and contouring
- Using electronic gearing with automatic correction for control systems with a shared load.
- Using electronic gearing to precisely control tension
- Optimization of velocity profile, optimization of mechanical couplings and method for selecting best motor for minimum power dissipation.
Miscellaneous
- Example application of Galil's H-bot firmware
- Various upgrades are presented including absolute and SSI encoder interfaces, backlash and leadscrew compensation, antifriction bias, two sets of PID and more.
- Learn about Ethernet and Modbus terminology, advantages, and special commands for motion control
- Galil Controller Provides Six Degrees of Freedom on ALIO Stage
- Galil Controller Provides Six Degrees of Freedom on ALIO Stage
- Choosing the Right Network for Your Applications
I/O Control
- Using Galil's RIO Ethernet I/O Controller for fast and intelligent processing of digital and analog inputs and outputs. Includes example of process loop for temperature control.
- Explanation of TTL and optoisolated I/O and how to connect to it.
- Demonstration of the Ladder Interface Software
- Introduction to Galil's RIO PLC
- Achieving Precise Temperature Control of a Liquid using RIO Pocket PLC
Software Tools
- Introduction to GDK Step-by-Step
- Galil Design Kit (GDK) features and tools at a general introductory level
- A walk through of the first steps of getting a Galil motion controller up and running using Galil Design Kit.
- Demonstration of the Ladder Interface Software
Motion Controllers
- Introduces Galil's highest performance, fifth generation stand-alone motion controller.
- See Dr. Jacob Tal demonstrate servo tuning and programming motion using a Galil motion controller, drives, servo motors and Galil software.
Motors & Drives
- Operation of brushless motors. Includes discussion about sinusoidal commutation. Discusses set-up with Galil controllers.
- Reviews servo amplifiers such as linear and PWM drives and voltage and current drives. Power supply and commutation considerations are discussed.
- Describes shunt regulators and when they are used. Calculations for both rotary and linear systems.
- Discusses advantages and disadvantages of these actuators. Compensation methods for optimum tuning are presented.
- Discusses step motor operation including full-step, half-step and microstep. How to configure Galil controllers for proper operation with step motors.
- Discusses microstepping including operation and performance. How to configure Galil's SDM-20640 microstepping drive.