Typically an engineer is faced with optimizing the performance of the motion control elements for the specific requirements of their application. This may involve some combination of minimizing settling time, ensuring the smoothest motion along a given trajectory, minimizing position error during motion or at the end point, reducing jerk, or achieving the lowest possible power consumption. Galil controllers offer a variety of tuning parameters, starting with Proportional-Integral-Derivative (PID) gains, that help the engineer meet these performance requirements.
The Galil Design Kit (GDK) software has always offered both manual tuning and “auto-crossover” one-button tuning to help optimize PID values. With this new version of GDK several new tuning and system evaluation tools have been added to help an engineer meet his application's performance requirements.
The GDK Pro Tuning & System Evaluation tool is used for tuning feedback loops and evaluating their performance. It allows easy access to the control filter, includes various auto-tuning algorithms for various situations, and includes evaluation algorithms to characterize the system performance.
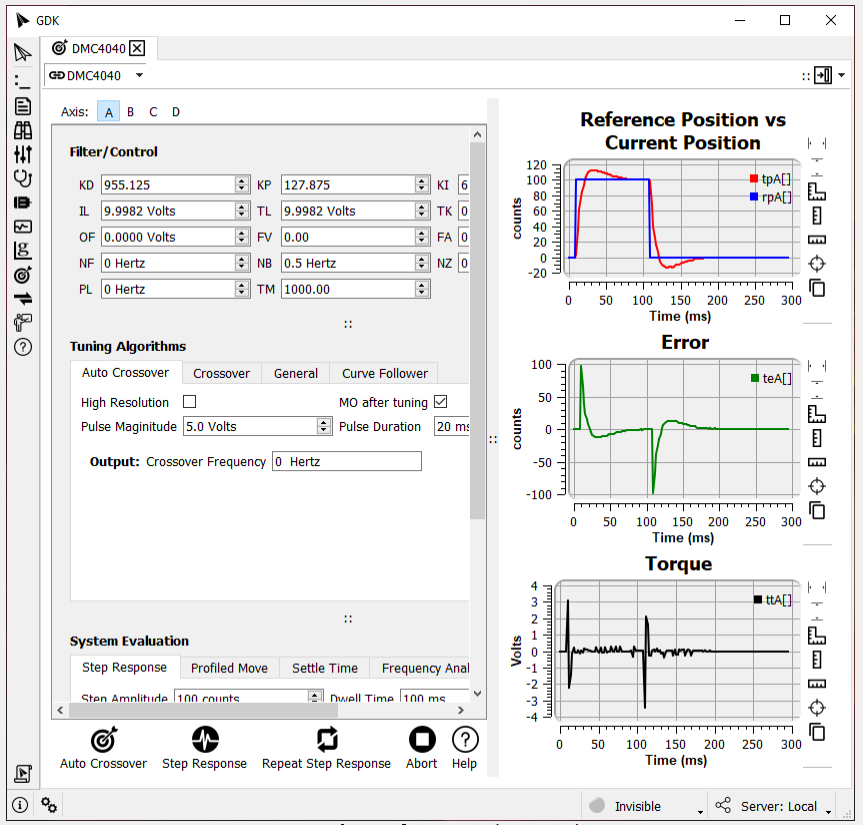
Figure 1 – GDK Tuning and System Evaluation layout
The tool is laid out into two main sections: inputs on the left and output plots on the right. The inputs are split into 3 panels: Filter/Control at the top, Tuning Algorithms in the middle, and System Evaluation at the bottom. The filer/control values can be adjusted manually in real time.
The Tuning options now include:
- Auto-Crossover: This algorithm should be used for most axes that use a torque mode amplifier or follow a similar control model. It evaluates an appropriate crossover frequency and applies the corresponding PID filter for the axis.
- Crossover: This algorithm is for more advanced users who want to tune their axis to a specific crossover frequency. It is identical to the Auto-Crossover algorithm, except it configures the PID filter to achieve a user-specified crossover (system bandwidth) frequency.
- General: This algorithm can be used for axes with a variety of configurations, such as an axis with a velocity mode amplifier. It determines the stiffest PID filter that can be applied while maintaining axis stability.
- Curve Follower: This algorithm should be used to tune axes that must follow a path as closely as possible. It determines the PID filter that results in the lowest maximum error during a move.
Note: All algorithms have a “high resolution” option. This is intended for systems with low inertia coupled with high resolution position feedback. This option should generally be used when the axis's position feedback is finer than 1 micron.
The bottom input panel is used for evaluating the performance of the feedback loop for the selected axis.
- Step Response: This is the classical method of determining whether a feedback loop is under, over, or critically damped,.
- Profiled Move: This allows the user to evaluate the system under real-world profiling conditions, to determine the response to specific speeds and accelerations.
- Settle Time: This evaluation measures the time required for the axis to settle to a specified error window. The axis is considered settled when it maintains a position error less than the specified “Error Limit” for a time period specified by “Window Duration”.
- Frequency Response: This evaluation is for more advanced users. It excites the axis at various frequencies and measures the amplitude of the response. The response is used to identify system characteristics, such as resonant frequencies. It has an open-loop mode and closed-loop mode, and the user can specify the excitation signal's amplitude and range of frequencies. This evaluation results in two plots per loop type: the top plot for each shows either the actual position against the reference position or error (depending on the loop type), and the bottom shows the system gain at each frequency. Figure 2 shows a typical response.
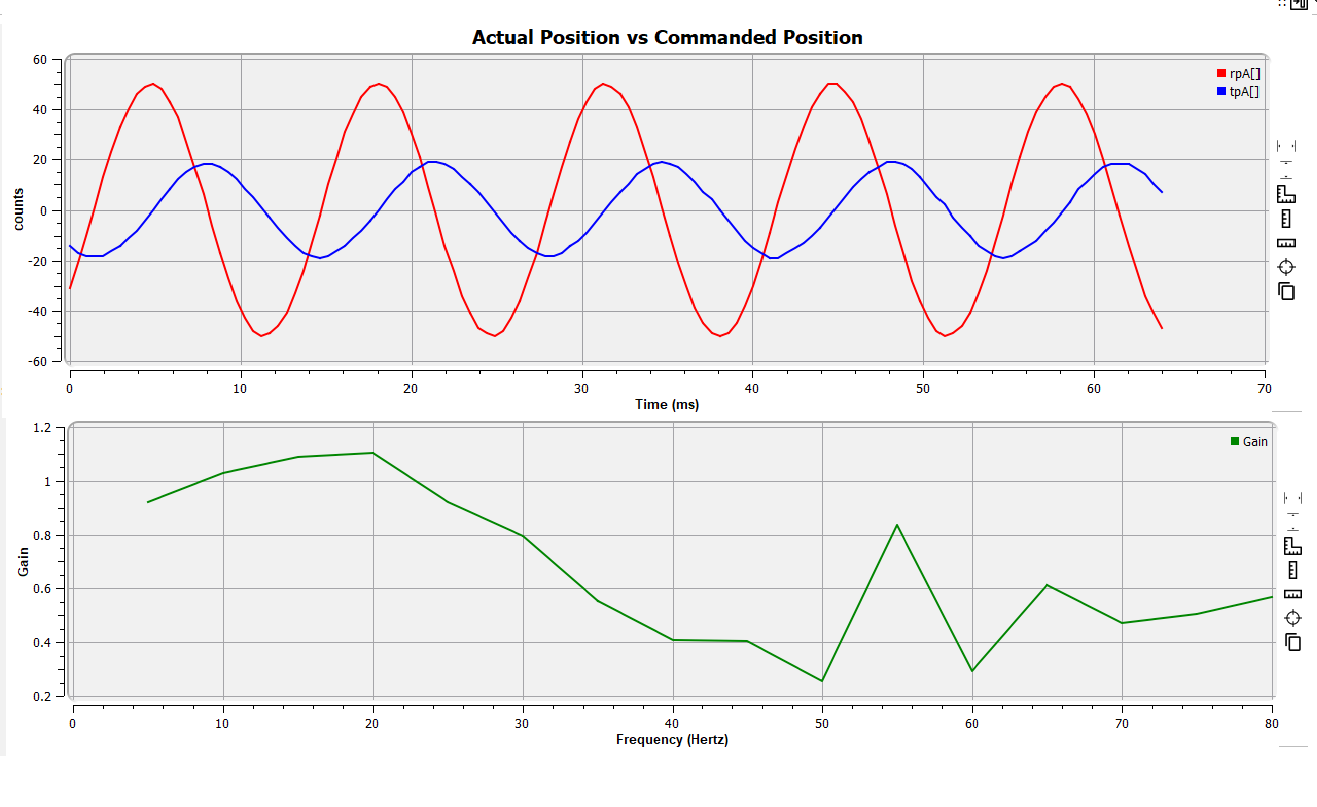
Figure 2 – Frequency Analysis output
GDK's new tuning and system evaluation tools are ideal to assist an engineer in optimizing the performance of their servo system. To learn more about GDK software, visit:
https://www.galil.com/downloads/software/gdk
If you have any questions about GDK or Galil products in general, feel free to contact Galil at 1.800.377.6329 or at support@galil.com