To get news about Galil in the market, read our quarterly newsletter called ServoTrends, or our monthly newsletter called What's New At Galil review our Press Releases or go to your favorite technical on-line or print publication such as Design News, Machine Design, Design World, Control Engineering, and more.
New EtherCAT Drive
EDD-3701x New EtherCAT Drive

The EDD-3701x EtherCAT slave drive joins Galil’s EtherCAT Family. This family has grown to include two EtherCAT masters and an I/O slave with both digital and analog I/O points. The EDD-3701x is a motor amplifier that operates in an EtherCAT distributed system where there are up to 32 slave drives and one master. It has a daisy chain topology using standard CAT5 Ethernet cables. The EDD-3701x can interface with Galil masters (DMC-500x0 and DMC-52xx0) for sophisticated applications or with TwinCAT® for very simple applications.
New Means of Communication for GDK Software

Figure 1: Communications Architecture
In keeping pace with advances in PC hardware and Operating Systems, Galil has released its latest generation of software tools for OEMs looking to develop fully featured, robust solutions to the most demanding motion control applications. This paper offers a brief overview a feature that may not be immediately familiar to long time Galil users, the gcaps server.
[White Paper] Advanced Control Techniques for Real World Drivetrains
The goal of a mechanical system built for motion control is to accurately move or position a load. In an ideal system, the load is rigidly coupled to, and directly driven by, a linear or rotary motor. There are many systems for which this drive method is not an option and a drivetrain is required to drive the load. Some common drivetrains include:
- Ball or lead screws
- Belt and pulley
- Chain and sprocket
- Gear trains or rack & pinion
- Hydraulics
Galil 2-day Live Training Coming in January 2018
Our next two-day product school is Thursday January 25, 2018 through Friday January 26, 2018 . The training will be at our headquarters in Rocklin, CA (near Sacramento).
[White Paper] Advanced Applications of Electronic Gearing Part 3
Part 3 of 3: Superposition of Motion Profiles
Introduction
This is the final paper of three delving into advanced electronic gearing topics in motion control. The first two, Tension Control on Spindle Wheel and Positional Correction on Color Print Rollers in Offset Printing, dealt with both low and high bandwidth corrections by correcting for frequency and phase.
This paper will cover how to apply electronic gearing to superimpose two motion profiles for a single axis. Three different examples will be discussed showing the many different applications where adding two motion profiles together can simplify the system’s design.
Example 1: Writing on a cake that is moving on a conveyor
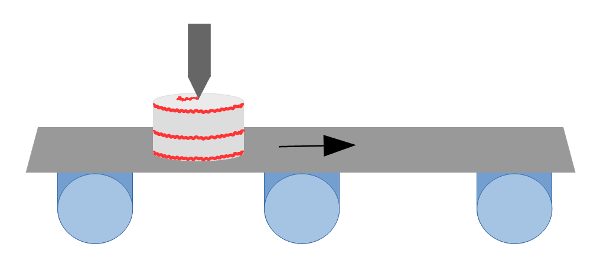
Figure 1: Cake writing on a moving conveyor